
 如果结果不匹配,请
如果结果不匹配,请 

 更多“在图6-8所示输送带的行星减速器中,已知z1=10,z2=3…”相关的问题
更多“在图6-8所示输送带的行星减速器中,已知z1=10,z2=3…”相关的问题
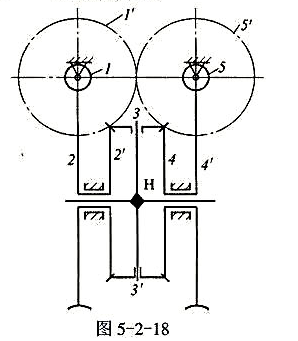
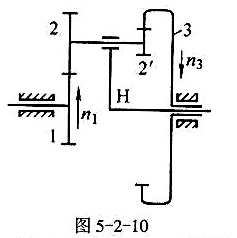
在图5-2-10所示差动轮系中,已知各轮的齿数 齿轮1的转速为200r/min(箭头向上),齿轮3的转速为50r/min(箭头向下),求行星架转速nH的大小和方向。
齿轮1的转速为200r/min(箭头向上),齿轮3的转速为50r/min(箭头向下),求行星架转速nH的大小和方向。
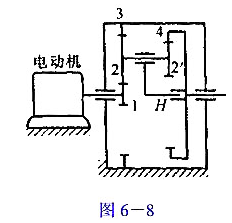
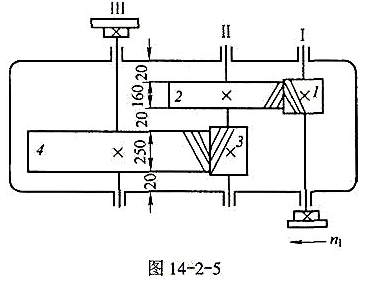
8.图示的输送带行星轮系中,已知各齿轮的齿数分别为z1=12,z2=33,z2’=30,z4=75。电动机的转速n1=1450 r/min。试求输出轴转速n4的大小与方向。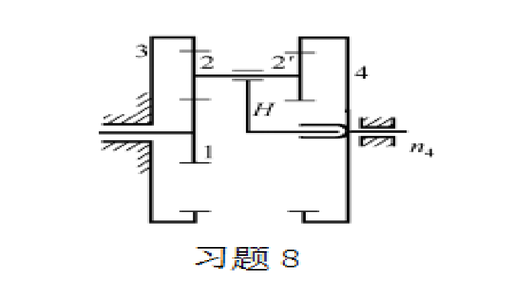
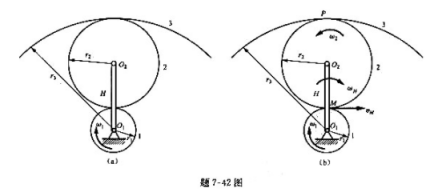
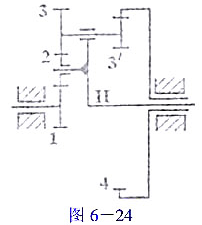
行星齿轮减速机构如题7-42图(a)所示。太阳轮1绕O1转动,带动行星轮2沿固定齿圈3滚动,行星轮2带动系杆H绕轴OH转动,从而实现了变速要求。已知各齿轮节圆半径分别为r1,r2。以及r3=r1+2r2,齿轮1和2的齿数分别为z1和z2,当齿轮1以角速度w1转动时,试求系杆角速度wH,以及传动比iH。
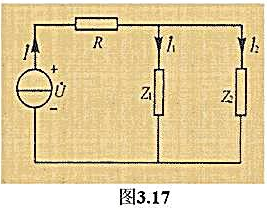
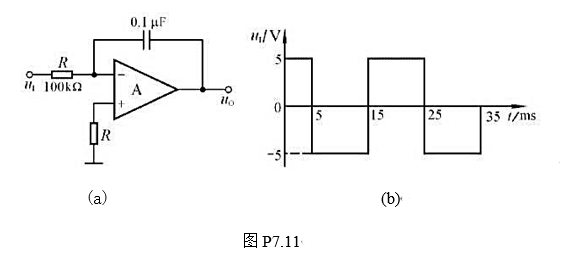
在图P7.11(a)所示电路中,已知输入电压u1的波形如图(b)所示,当t=0时uc=0.
试画出输出电压uo的波形.






 求传动比i1H。
求传动比i1H。