

 如果结果不匹配,请
如果结果不匹配,请 

 更多“____. I'm fond of pingpong.”相关的问题
更多“____. I'm fond of pingpong.”相关的问题
设 为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
l)确定线段P1P2的中点坐标:
2)若P1,P2,P3不共线,试证△P1P2P3的重心的坐标为
(注:设Pi(xi,yi,zi),i=1,2....n.则由坐标

所确定的点P称为Pi(1≤i≤n)的重心.)
A.毛细血管静水压(Pc)
B.组织间隙静水压(Pi)
C.毛细血管胶体渗透压(πc)
D.组织间隙胶体渗透压(πi)
E.滤过系数(Kf)
A、
B、
C、
D、
 (1)试求各等奖的中奖概率pi(i=1,2,…,7);
(1)试求各等奖的中奖概率pi(i=1,2,…,7);
(2)试求中奖的概率。
(1)电流反馈系数β和转速反馈系数α。
(2) 当电动机在最高转速发生堵转时的Udo,U'i,Ui,Uc值。
A.when
B.while
C.as
D.since
令V是实数域R上一个三维向量空间,σ是V的一个线性变换。它关于V的某一个基的矩阵是
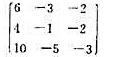
(i)求出σ的最小多项式p(x),并把p(x)在R[x]内分解为两个最高次项系数是1的不可约多项式p1(x)与p2(x)的乘积;
(ii)令Wi={ξ∈V|pi(σ)ξ=0},i=1,2。证明,Wi是σ的不变子空间,并且V=W1⊕W2;
(iii)在每一子空间Wi中选取一个基,凑成V的一个基,使得σ关于这个基的矩阵里只出现三个非零元素。
A.so
B.even
C.as
D.as if
















