

 如果结果不匹配,请
如果结果不匹配,请 

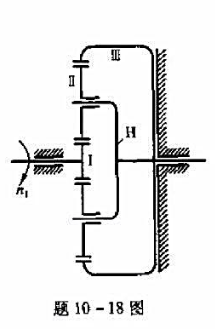
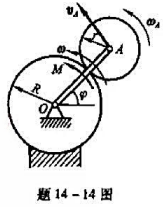
 更多“图示为风钻的行星减速轮系,轮I的齿数z1=10,转速n1=1…”相关的问题
更多“图示为风钻的行星减速轮系,轮I的齿数z1=10,转速n1=1…”相关的问题
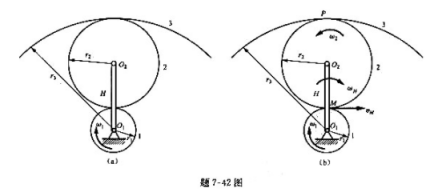
行星齿轮减速机构如题7-42图(a)所示。太阳轮1绕O1转动,带动行星轮2沿固定齿圈3滚动,行星轮2带动系杆H绕轴OH转动,从而实现了变速要求。已知各齿轮节圆半径分别为r1,r2。以及r3=r1+2r2,齿轮1和2的齿数分别为z1和z2,当齿轮1以角速度w1转动时,试求系杆角速度wH,以及传动比iH。
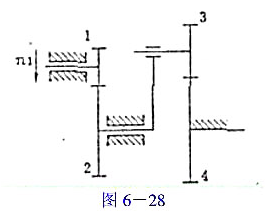
在图6-28所示轮系中,已知各轮的齿数z1=20,z2=40,z3=15,z4=60,轮1的转速n1=120r/min转向如图6-28所示,试确定轮3的转速n3的大小和方向.
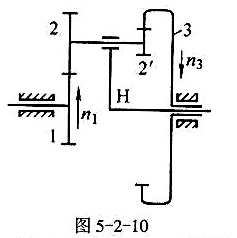
在图5-2-10所示差动轮系中,已知各轮的齿数 齿轮1的转速为200r/min(箭头向上),齿轮3的转速为50r/min(箭头向下),求行星架转速nH的大小和方向。
齿轮1的转速为200r/min(箭头向上),齿轮3的转速为50r/min(箭头向下),求行星架转速nH的大小和方向。
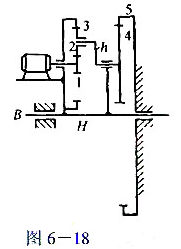
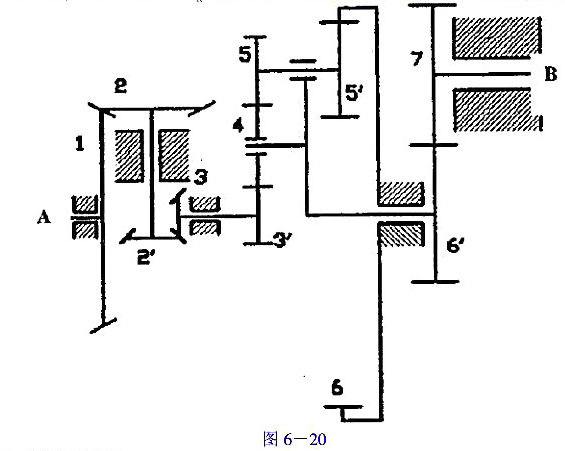
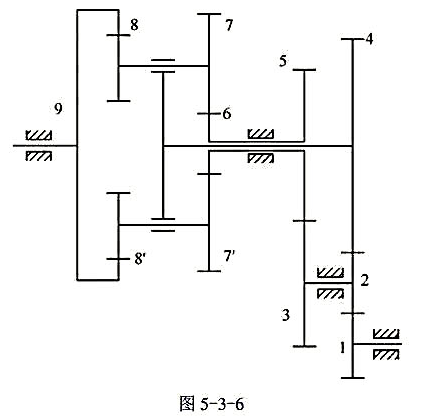
在图示6-20轮系中,设A轴的转速为19r/min,已知Z1=90,Z2=60,Zy=15,Z3=30,Z3´=24'Z4=18'Z5=15'Z5´=30'Z6=105'Z6´=35'Z7=32'求B轴的转速及转向.
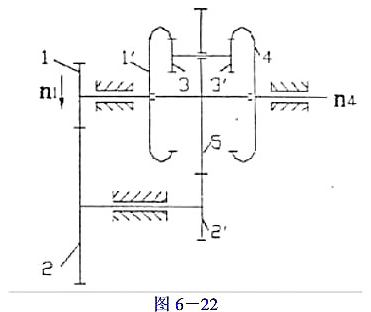
(1)该轮系的自由度,并指出是否存在局部自由度以及虚约束。
(2)求传动比。






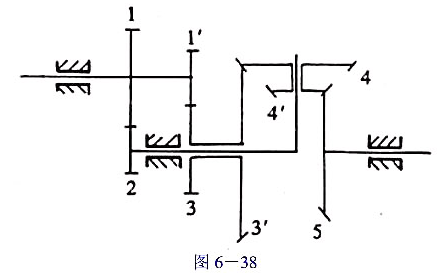
 1,求齿轮Z1与系杆H的传动比
1,求齿轮Z1与系杆H的传动比 ?
?










