

 如果结果不匹配,请
如果结果不匹配,请 

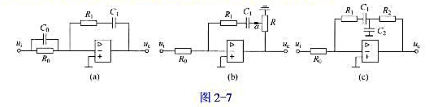
 更多“试求出图2-7中各有源网路的传递函数W(s)=Ue(s)/U…”相关的问题
更多“试求出图2-7中各有源网路的传递函数W(s)=Ue(s)/U…”相关的问题
系统的微分方程组如下

式中:K0、K1、K2、T均为正常数。试建立系统结构图,并求出传递函数C(s)/R(s)、C(s)/N1(s)、C(s)/N2(s)。
系统的微分方程如下,式中:τ、K1、K2、K3、K4、K5、T均为正的常数。试建立系统r(t)对c(t)的动态结构图,并求出系统的传递函数C(s)/R(s)。

设一系统具有下述传递函数

试问是否有可能利用状态反馈将传递函数变为
若有可能,试求出其状态反馈向量k,并画出其结构图。
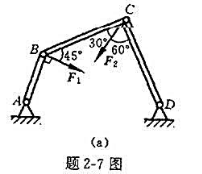
在四连杆机构ABCD的铰链B和C上分别作用有力F1和F2机构在题2-7图(a)所示位置平衡。试求平衡时力F1和F2的大小之间的关系。
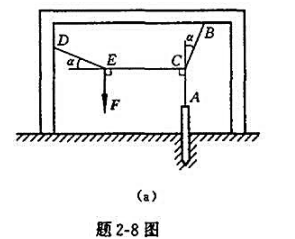
如题2-7图(a),为拔出木桩,在桩的上端系绳AB,在该段绳中间某点再系绳CD,B端和D端固定。在CD段绳中某点E作用一向下的力F,以使桩的,上端产生一向上拔的力。若这时AC段是铅垂的,CE段是水平的,BC段与铅垂线的夹角和ED段与水平线夹角均为a,且有tanα=0.1,试求拔木桩的力有多大?
试判断题9.14图中各电路是什么类型的滤波器(是低通、高通、带通、还是带阻滤波器,是有源还是无源滤波,几阶滤波?)。
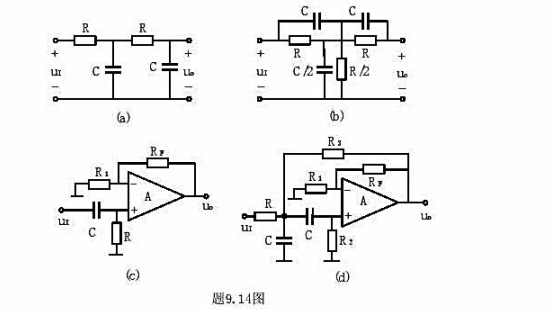
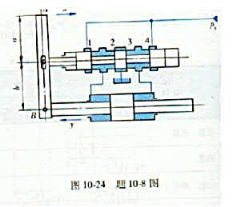
图10-24所示为四通伺服阀控制的机液伺服控制系统,试阐述工作原理,画出系统的框图,并求出其x输入输出y之比。






 ,试求出系统的约旦标准型的实现
,试求出系统的约旦标准型的实现










