

 如果结果不匹配,请
如果结果不匹配,请 

 更多“路径的排列顺序与路径运算结果无关。()”相关的问题
更多“路径的排列顺序与路径运算结果无关。()”相关的问题
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
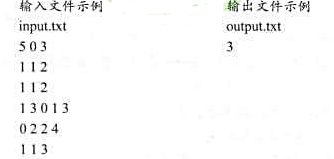
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
A.使用[间隔工具(Spacing)]进行复制应用后,如果对结果不满意,可以再次打开[间隔工具(Spacing)]对话框进行调节。
B.使用[间隔工具(Spacing)]所拾取的路径可以是包含多个样条曲线的合成图形。
C.[间隔工具(Spacing)]复制得到的物体必然存在着关联,即对其中任何一个物体进行修改,都会影响到其它物体。
D.使用[间隔工具(Spacing)]进行复制时,一定会在路径的起始点上产生物体。
 曲线
曲线B、各牙之间紧密接触
C、两侧牙列整齐对称
D、两侧平面高度一致
E、后牙排列以美观为主
选择后牙,除确定后牙的大小外,还应考虑一个重要指标是A、牙冠颊、舌径宽度
B、牙冠近远中径的长度
C、牙冠龈高度
D、牙冠面形态
E、牙冠轴面外形
全口义齿下后牙常规的排列顺序为A、 →
→ →
→ →
→
B、→→ →
→
C、 →
→ →
→ →
→ 同样方法排另一侧
同样方法排另一侧
D、→→→同样方排另一侧
E、→→→同样方法排另一侧
全口义齿后牙排列过分偏舌的主要弊端为A、颌间距离相对小排牙困难
B、易咬颊
C、不美观
D、影响义齿固位
E、易形成不利的杠杆作用










 在右半平面(x>0)内与路径无关,其中f(x)可导,f(1)=1,求f(x)。
在右半平面(x>0)内与路径无关,其中f(x)可导,f(1)=1,求f(x)。









