
 1=10rad/s回转,机构各构件尺寸为lBC=43mm,lAC=35mm,且AB⊥AC,CB⊥ED,lBE=lCE=lED.试用相对运动图解法求构件3的角速度 3和角加速度a3,以及D点的速度vD和加速度aD.
1=10rad/s回转,机构各构件尺寸为lBC=43mm,lAC=35mm,且AB⊥AC,CB⊥ED,lBE=lCE=lED.试用相对运动图解法求构件3的角速度 3和角加速度a3,以及D点的速度vD和加速度aD.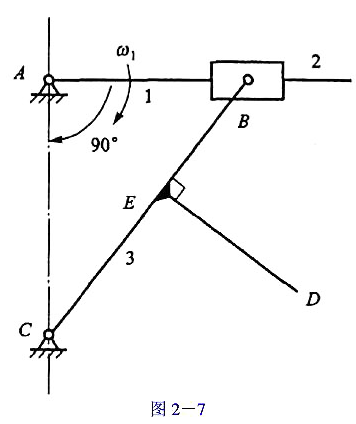

 如果结果不匹配,请
如果结果不匹配,请 

 更多“图2-7所示机构中,若已知构件1以等角速度1=10rad/s…”相关的问题
更多“图2-7所示机构中,若已知构件1以等角速度1=10rad/s…”相关的问题
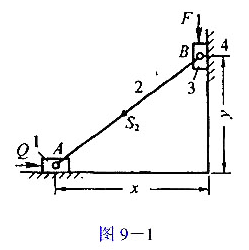
在图9-1所示机构中,已知:x=250mm,y=200mm,lAS2=128mm,F为驱动力,Q为有效阻力.m1=m3=2.75kg,m2=4.59kg,Js2=0.0l2kg·m2,又原动件3以等速v=5m/s向下移动,试确定作用在各构件上的惯性力.
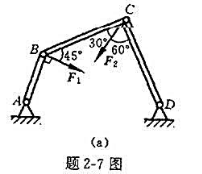
在四连杆机构ABCD的铰链B和C上分别作用有力F1和F2机构在题2-7图(a)所示位置平衡。试求平衡时力F1和F2的大小之间的关系。
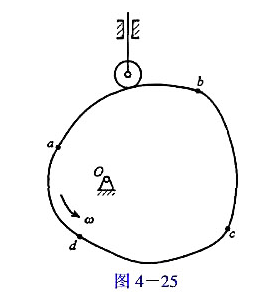
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0表示,行程以h表示,偏心距以e表示,压力角以a表示,推杆位移以s表示,凸轮的推程运动角δ0表示,回程运动角δ´0以表示,远休止角以δ´8表示,近休止角以δ´8表示,a为实际廓线推程起始点,b为实际廓线推程终止点,c为实际廓线回程起始点,d为实际廓线回程终止点.试作图表示:
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ´0、远休止角δ´8和近休止角δ´8.
在图题9.2.1所示的施密特触发器电路中,已知R1=10kΩ,R2=20kΩ。G1、G2为
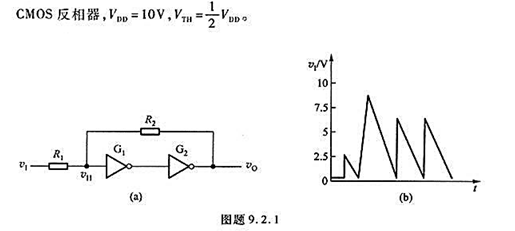
(1)试计算电路的正向阈值电压VT+、负向阈值电压VT-和回差电压ΔVT。
(2)若电路的输入信号v1波形如图题9.2.1(b)所示,试画出相应的输出电压v0的波形。
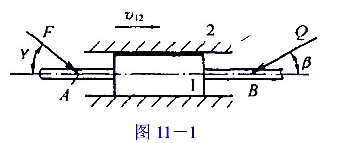
在平面滑块机构中,若已知驱动力F和有效阻力Q的作用方向和作用点A和B(设此时滑块不会发生倾侧)以及滑块1的运动方向(如图11-1所示).运动副中的摩擦系数f和力Q的大小均已确定.试求此机构组成的机器的效率.
已知系统的开环对数频率特性曲线如图6-4所示。
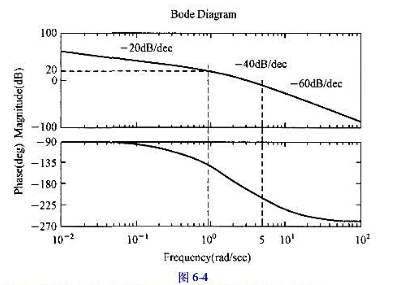
(1)画出系统频率特性的极坐标图,并由Nyquist判据分析系统的稳定性:
(2)若加入校正装置 ,试画出校正后系统的Bode图,并由Bode图分析系统的稳定性。
,试画出校正后系统的Bode图,并由Bode图分析系统的稳定性。
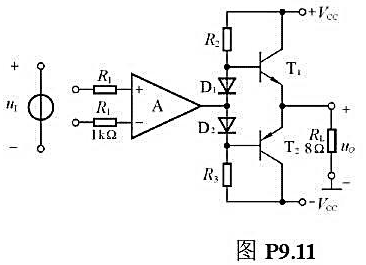
(1)若输入电压幅值足够大,则电路的最大输出功率为多少?
(2)为了提高输入电阻,稳定输出电压,且减小非线性失真,应引
(3)若Ui=0.1V时,U0=5V,则反馈网络中电阻的取值约为多少?
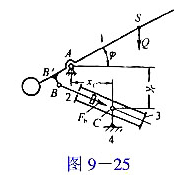
在图9-25所示的消防梯升降机构中,已知lBB´=200mm,
AB´=400mm,lAS=1500mm、xc=yc=800mm,荷重Q=3000N,φ=30°,求应加于油缸活塞上的平衡力Fb及各运动副中的反力.
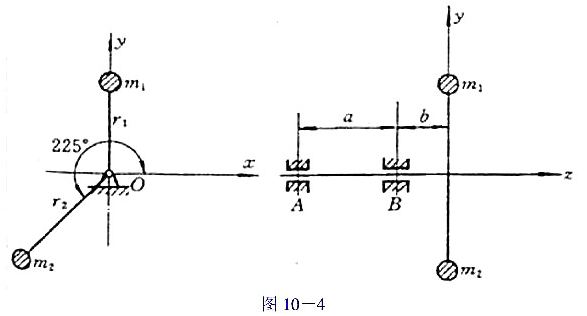
(1)因两集中质量的惯性力而在支承A、B处产生的动压力RA和RB的大小与方向;
(2)为使该回转件达到动平衡,在xOy平面上应加平衡质径积mbrb的大小和方向.






 1,求齿轮Z1与系杆H的传动比
1,求齿轮Z1与系杆H的传动比 ?
?










