如果结果不匹配,请
如果结果不匹配,请 

 更多“系统结构如图2-6-23所示。选取Ge(s)使干扰N对系统无…”相关的问题
更多“系统结构如图2-6-23所示。选取Ge(s)使干扰N对系统无…”相关的问题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
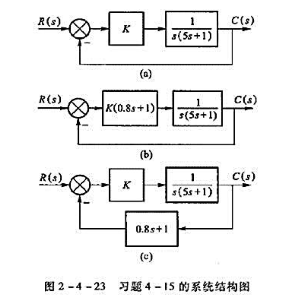
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
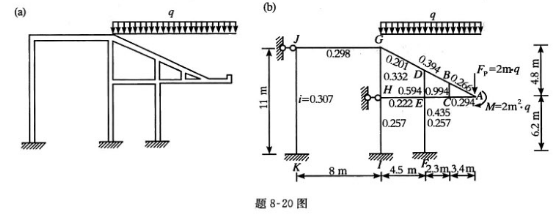
剧院眺台结构如题8-20图(a)所示,其计算简图如图(b)所示,杆旁数字为杆的线刚度i.在竖向荷载q作用下,试作M图。注意:本题有结点线位移。
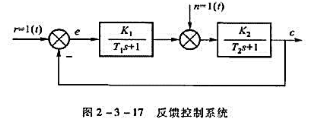
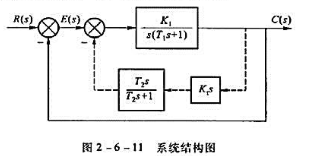
原系统如图2-6-11中实线所示,其中K1=440,T1=0.025 。欲加反馈校正(如图中虚线所示),使系统的相对稳定裕度γ=50°,试求的K1,T2的值。
已知系统结构图如图2-2-18所示。
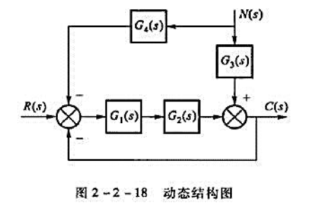
①求传递函数C(s)/R(s) ,C(s)/N(s)。
②若要消除N(s)的影响,C4(s) =?
系统结构图如图2-5-41所示。
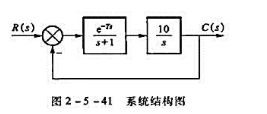
①画出T=0时开环对数频率特性曲线,并确定此时的相稳定裕度γ;
②求T=0.05s时的相稳定裕度γ2;
③确定使闭环系统稳定时T的取值范围(T>0)。
设电子心律起搏器系统如图2-3-8所示,其中模仿心脏的传递函数相当于一纯积分器。
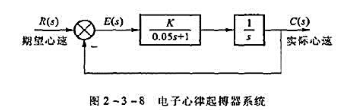
①若ζ=0.5对应最佳响应,问起搏器增益K应取多少?
②若期望心速为60次/min ,并突然接通起搏器,问1min后实际心速为多少?瞬时最大心速为多少?
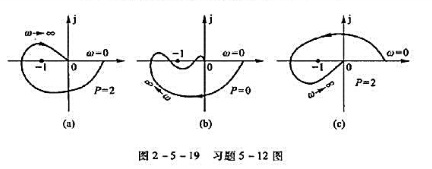
已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数目。试说明传递函数 代表的闭环系统是否稳定,为什么?
代表的闭环系统是否稳定,为什么?