如果结果不匹配,请
如果结果不匹配,请 

 更多“二阶系统单位阶跃响应函数的过渡过程随着阻尼比ζ的(),其振荡…”相关的问题
更多“二阶系统单位阶跃响应函数的过渡过程随着阻尼比ζ的(),其振荡…”相关的问题
设单位反馈控制系统的开环传递函数为

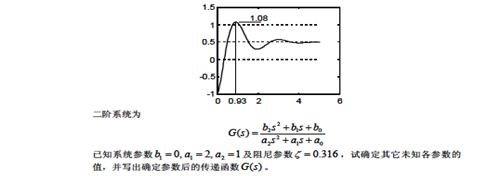
试采用二阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
(a)静志速度误差系数工ky≥10:
(b)阶跃响应的过渡时间te<0.4秒:
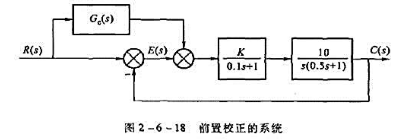
系统如图2-6-18所示,要求闭环回路部分的阶跃响应无超调,并且整个系统(C(5)对R(5))具有二阶无差度。试确定K值及前置校正Gc(s)
一单位反馈控制系统的开环传递函数为 ,其单位阶跃响应曲线如图P3-1所示,
,其单位阶跃响应曲线如图P3-1所示,
图中的Xm=1.25, tm=1.5s.试确定系统参数KK及τ值.

已知单位反馈系统的开环传递函数为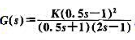 试完成:
试完成:
(1)绘制系统的根轨迹图;
(2)确定系统稳定时K的取值;
(3)求出系统在单位阶跃输入下,稳态误差可能到达的最小绝对值 。
。
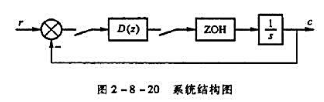
系统的结构图如图2-8-20所示,采样周期T=1s, 试设计控制器的脉冲传递函数D(z),使该系统在输入为单位阶跃信号时,输出满足以下条件:c(0)=0,c(k)=1,k>0,其中k为正整数。
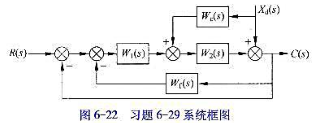
设复合控制系统的方框图如图6-22所示,其中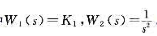 。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
控制系统方框图如图3-4所示。试求:
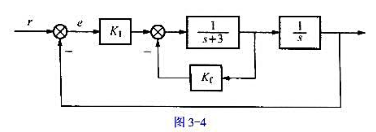
(1)当K1=25和Kt=0时,系统的阻尼系数ξ,无阳尼自然振荡频率ωn以及系统对单位斜坡输入的稳态
误差ess;
(2)当K1=25和Kt=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,在单位斜坡输入信号作用下系统的稳态误差ess=0.1。试确定K1和Kt的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽,上升时间和调整时间。