如果结果不匹配,请
如果结果不匹配,请 

 更多“设受控对象的开环模型为试采用四阶参考模型法设计校正装置Ge(…”相关的问题
更多“设受控对象的开环模型为试采用四阶参考模型法设计校正装置Ge(…”相关的问题
设单位反馈控制系统的开环传递函数为

试采用二阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
(a)静志速度误差系数工ky≥10:
(b)阶跃响应的过渡时间te<0.4秒:
设信源模型为
(1)码符号集为X= {0,1,2},试对信源进行Huffman编码并求平均码长、编码效率和编码后信息传输速率。
(2)构造一种有约束的具有最小平均长度的异前置码,此约束是每个码字的第1个符号可以是0,1,2;后续的符号为0或1。
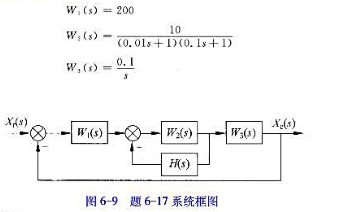
采用反馈校正后的系统结构如图6-9所示,其中H(s)为校正装置,W2(s)为校正对象。要求系统满足下列指标:位置稳态误差ep(∞)=0;速度稳态误差ev(∞)=0.5%; γ(ωc)≥45°。试确定反馈校正装置的参数,并求等效开环传递函数。图中
(1)如果真实的模型是Yi=β1Xi+μi,但你却拟合了一个带截距项的模型Yi=α0+α1Xi+νi,试评述这一设定误差的后果。
(2)在(1)中,假设真实的模型是带截距项的模型,而你却对过原点的模型进行了普通最小二乘回归。请评述这一模型误设的后果。
设一随动系统,其开环传递函数为
如要求系统的速度稳态误差为10%,Mp≤1.5,试确定中联校正装置的参数。
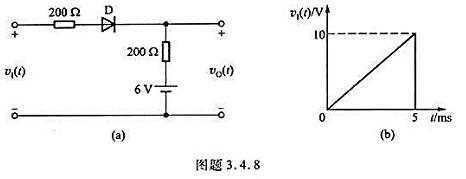
绘出vo(t)的波形。使用恒压降模型(VD=0.7 V),设二极管是理想的。