如果结果不匹配,请
如果结果不匹配,请 

 更多“面向对象方法是从算法为出发点来构造系统。()”相关的问题
更多“面向对象方法是从算法为出发点来构造系统。()”相关的问题
可从多个角度出发,为不同的对象服务,为患者的选择提供参考的评价应
A.从医疗机构的角度出发
B.从全社会角度出发
C.从患者角度出发
D.从患者和医院角度出发
E.从保险公司的角度出发
考虑文法S AS|b
A SA|a
(1)构造文法的LR(0)项目集规范族及相应的DFA。
(2)如果把每一个LR(0)项目看成一个状态,并从每一个形如Ba:Xb的状态出发画一条标记为X的箭弧刀状态Ba.Xb,而且从每一个形如Ba.Ab的状态出发画标记为的箭弧到所有形如A●g的状态。这样就得到了一个NFA。说明这个NFA与(a)中的DFA是等价的。
(3)构造文法的SLR分析表。
(4)对于输入串bab,给出SLR分析器所作出的动作。
(5)构造文法的LR(1)分析表和LALR分析表。
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。
有关婚育问题的咨询对象包括
A.对生殖健康有问题准备结婚的男女和新婚夫妇
B.是“暂缓结婚”问题和“不宜生育”问题
C.做好孕前准备,包括受孕时机,受孕季节的选择,夫妇双方的健康,心理、环境等因素的准备,同时要消除不利受孕因素的影响如戒烟,戒酒、避免有害物理化学因素的接触,掌握受孕的方法如基础体温测量法、日程推算法、宫颈粘液观察法
D.为服务对象守密,尊重服务对象的隐私权
E.保证任何一位要求结婚生育的男女青年的要求
问题描述:机器人Rob在一个有n×n个方格的方形区域F中收集样本.(i,j)方格中样本的价值为v(i,j),如图3-6所示.Rob从方形区域F的左上角A点出发,向下或向右行走,
直到右下角的B点,在走过的路上,收集方格中的样本.Rob从A点到B点共走2次,试找出Rob的2条行走路径,使其取得的样本总价值最大.
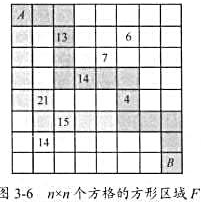
算法设计:给定方形区域F中的样本分布,计算Rob的2条行走路径,使其取得的样本总价值最大.
数据输入:由文件input.xt给出输入数据.第1行有1个正整数n,表示方形区域F有n×n个方格.按下来每行有3个整数,前2个数表示方格位置,第3个数为该位置样本价值.最后一行是3个0.
结果输出:将计算的最大样本总价值输出到文件output.txt.