如果结果不匹配,请
如果结果不匹配,请 

 更多“如图9-10所示,铜盘半径R=50cm, 在方向为垂直盘面的…”相关的问题
更多“如图9-10所示,铜盘半径R=50cm, 在方向为垂直盘面的…”相关的问题
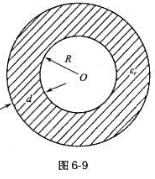
如图6-9所示,一个导体球带电q=1.00x10-8C,半径为R=10.0cm,球外有一层相对电容率为εr=5.00的均匀电介质球壳,其厚度d=10.0cm,电介质球壳外面为真空。(1)求离球心O为r处的电位移和电场强度;(2)求离球心O为r处的电势;(3)分别取r=5.0cm,15.0cm和25.0cm,算出相应的场强E和电势U的量值(4)求出电介质表面上的极化电荷的面密度。
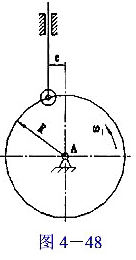
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.
已知系统结构图如图2-2-18所示。
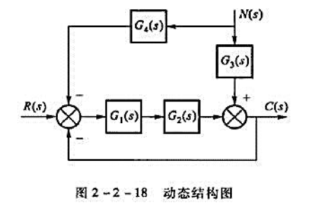
①求传递函数C(s)/R(s) ,C(s)/N(s)。
②若要消除N(s)的影响,C4(s) =?
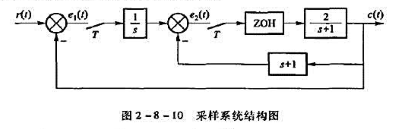
采样系统结构图如图2-8-10所示,图中T为采样周期,T=1s。求出闭环系统脉冲传递函数C(z)/R(z),并判断闭环系统的稳定性。
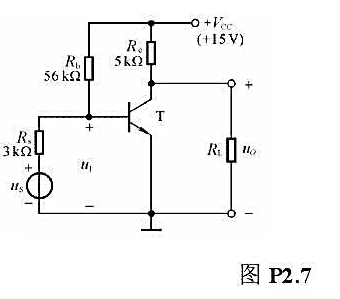
电路如图P2.7所示,晶体管的β=80,rbb=100Ω.分别计算RL=∞和RL=3kΩ时的Q点、Au、Ri和R0.
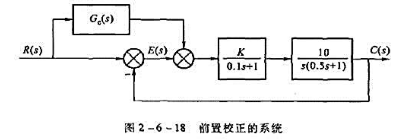
系统如图2-6-18所示,要求闭环回路部分的阶跃响应无超调,并且整个系统(C(5)对R(5))具有二阶无差度。试确定K值及前置校正Gc(s)
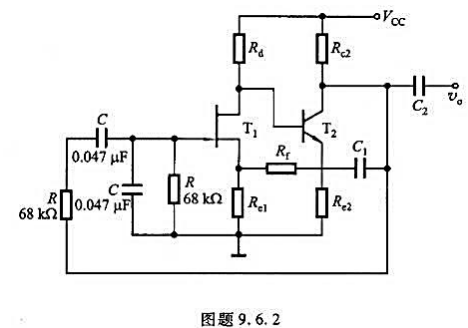
电路如图题9.6.2所示。(1)试从相位平衡条件分析电路能否产生正弦波振荡;(2)若能振荡,Rf和Re1的值应有何关系?振荡频率是多少?为了稳幅,电路中哪个电阻可采用热敏电阻,其温度系数如何?
控制系统的结构如图3-3所示。
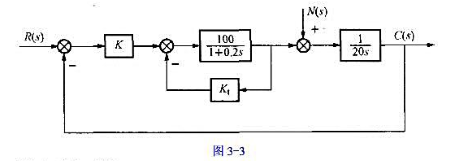
(1)当输入r(t)为单位阶跃函数,n(t)=0时,试选择K和Kt,使得闭环系统的超调虽σ%=40%,调整时间 ;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
;并计算稳态位置,速度和加速度误差系数Kp、Kv、Ka;
(2)设干扰n(t)=0,输入r(t)=t,试问K和Kt之值对稳态误差有何影响?
(3)设输入r(t)=0。当干扰n(t)为单位阶跃函数时,K和Kt之值对稳态误差有何影响?
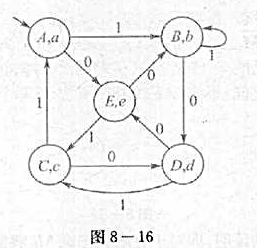
给定有限状态机M=(Q,S,R,f,h,A),它的状态图如图8-16所示。
a)求状态A的01110的后继以及可接受状态序列。
b)求状态E的100101的后继以及可接受状态序列。
c)验证f(f(A,010),110)=f(A,010110),
h(f(A,010),110)=h(A,010110)。
d)求M对于激励010110的响应。
e)构造一台与M相似的转换赋值机,并求它对激励010110的响应。