

 如果结果不匹配,请
如果结果不匹配,请 

 更多“机器人自主移动导航方式为有标识导引的无轨路径导航时,可以选择…”相关的问题
更多“机器人自主移动导航方式为有标识导引的无轨路径导航时,可以选择…”相关的问题
A.“示教再现”方式
B.“可编程控制”方式
C.“遥控”方式
D.“自主控制”方式
A.病房、隔离病房区域
B.发热门诊区域
C.手术室区域
D.医院食堂餐厅
A.自主收费
B.定位导航
C.车位识别,对所需车位的长度和宽度有最小要求
D.物联网、车联网的全面覆盖,通讯不稳定问题
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
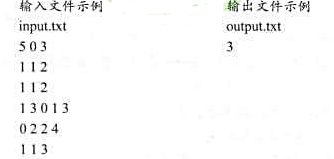
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
A.通过系统查询客户有移动数据流量业务功能、有4G功能
B.通过双向支撑查询GPRS业务显示为:未开通,则需重做功能
C.重做后需要提醒客户将手机关开机后再试
















