

 如果结果不匹配,请
如果结果不匹配,请 

 更多“EHS的含义是E表示环保,H表示健康,S表示安全,统称为EH…”相关的问题
更多“EHS的含义是E表示环保,H表示健康,S表示安全,统称为EH…”相关的问题
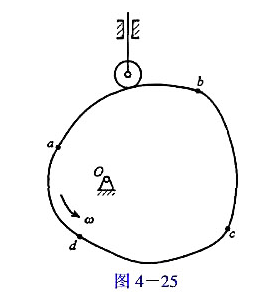
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0表示,行程以h表示,偏心距以e表示,压力角以a表示,推杆位移以s表示,凸轮的推程运动角δ0表示,回程运动角δ´0以表示,远休止角以δ´8表示,近休止角以δ´8表示,a为实际廓线推程起始点,b为实际廓线推程终止点,c为实际廓线回程起始点,d为实际廓线回程终止点.试作图表示:
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ´0、远休止角δ´8和近休止角δ´8.
在ICD-10的符号中,NOS和NEC的含义实际上是:()
A、表示术语内容不完整
B、辅助性的修饰词
C、提示资料不完整
D、表示可酌情编码
E、以上都不是
在ICD-10的符号中,NOS和NEC的含义实际上是
A、表示术语内容不完整
B、辅助性的修饰词
C、提示资料不完整
D、表示可酌情编码
E、减少重复
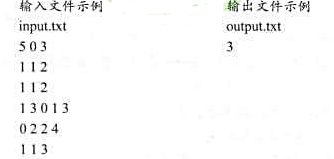
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
测定的精密度
药物分析术语的含义A、标准差或变异系数表示
B、回收实验可表明
C、回归系数表示
D、相关系数表示
E、有效数字表示
测定的准确度
药物分析术语的含义A、标准差或变异系数表示
B、回收实验可表明
C、回归系数表示
D、相关系数表示
E、有效数字表示
















