
 如果结果不匹配,请
如果结果不匹配,请 

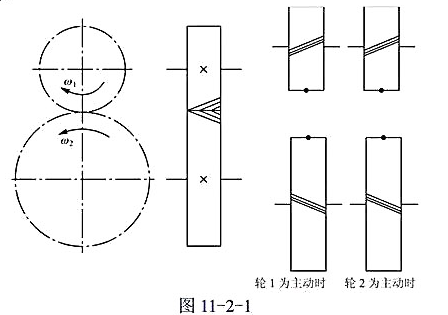
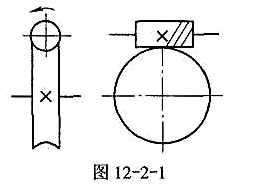
 更多“如图12-2-1所示,蜗杆主动,T1=20N·m,m=4mm…”相关的问题
更多“如图12-2-1所示,蜗杆主动,T1=20N·m,m=4mm…”相关的问题
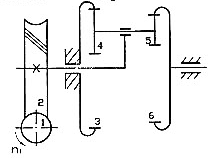
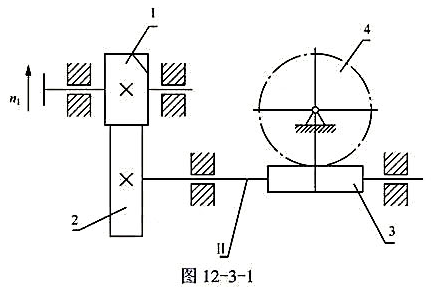
(1)试安排齿轮2的螺旋角旋向和蜗杆3的导程角旋向(用文字说明旋向并在图中画出);
(2)标出齿轮2和蜗杆3上的啮合点的三个分力的方向;
(3)标出蜗轮的转向并说明蜗轮的螺旋角旋向。
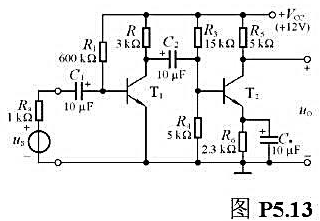
电路如图P5.13所示.试定性分析下列问题,并简述理由
(1)哪一个电容决定电路的下限频率;
(2)若T1和T2静态时发射极电流相等,且rbb和Cπ相等,则哪一级的上限频率低.
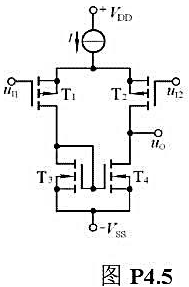
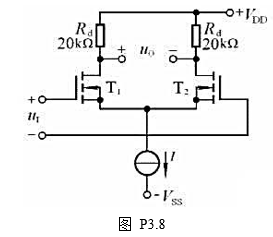
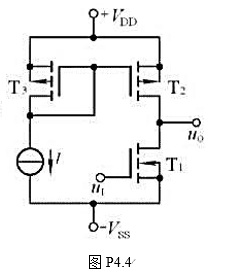
(1)求解电压放大倍数的表达式;(2)当有共模输入电压时,u0=?简述理由.
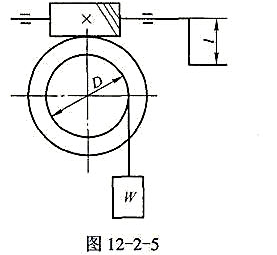
问:(1)欲使重物W上升1m,蜗杆应转多少转?(2)蜗杆与蜗轮间的当量摩擦系数f´=0.18,该机构能否自锁?(3)若重物W=5kN,手摇时施加的力F=100N,手柄转臂的长度1应是多少?
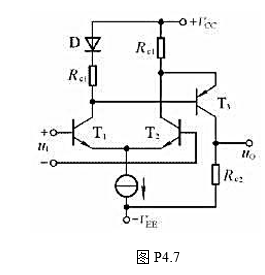
电路如图P4.4所示,T1管的低频跨导为gm,T1和T2管d-s间的动态电阻分别为 和
和 试求解电压放大倍数
试求解电压放大倍数 的表达式.
的表达式.
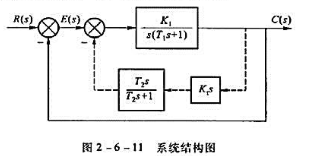
原系统如图2-6-11中实线所示,其中K1=440,T1=0.025 。欲加反馈校正(如图中虚线所示),使系统的相对稳定裕度γ=50°,试求的K1,T2的值。