如果结果不匹配,请
如果结果不匹配,请 

 更多“深度负反馈放大器如图LT5-16(a)所示,图中RF4=1k…”相关的问题
更多“深度负反馈放大器如图LT5-16(a)所示,图中RF4=1k…”相关的问题
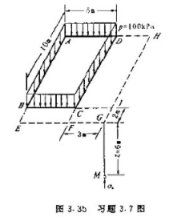
如图3.35所示矩形面积(ABCD)上作用均布荷载p=100kPa,试用角点法计算G点下深度6m处M点的附加应力值σ.
控制系统如图4-29所示,其中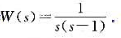
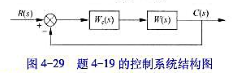
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
某系统结构图如图2-9-7所示
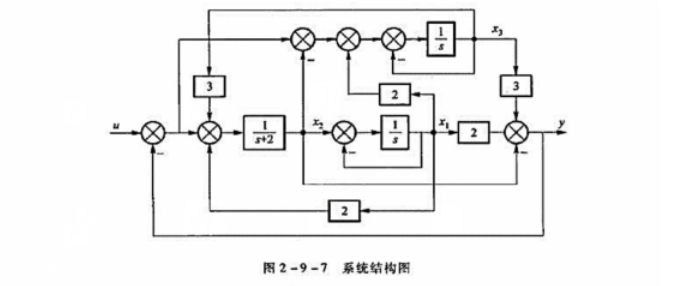
①据图2-9-7所给出的系统状态变量x1、x2、x3,求该系统的动态方程(状态方程和输出方程)。
②根据①所求出的动态方程,判断系统的可控性和可观测性。
③求该系统的矩阵指数eAi。
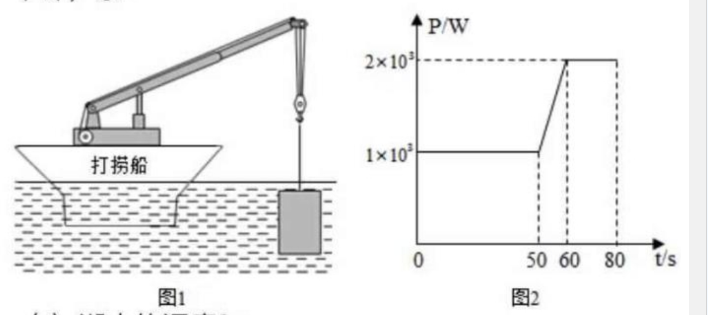
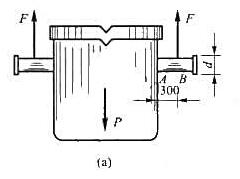
(1)湖水的深度h;
(2)物体的密度p;
(3)在0~50s时间内,若电动机的效率为80%,求电动机线圈电阻。