如果结果不匹配,请
如果结果不匹配,请 

 更多“当运输任务只有一个装货点和一个卸货点时,运输企业调度需要规定…”相关的问题
更多“当运输任务只有一个装货点和一个卸货点时,运输企业调度需要规定…”相关的问题
A.
B.
C.
D.
A.建井前建立的井筒十字中心线点的成果资料
B.钻井前建井的井筒十字中线点的位置图
C.近井点的成果资料
D.实测井底或停钻点的高程
E.根据实测井筒有效断面中心,改建后的井筒十字中线点位置图
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
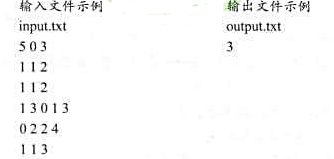
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
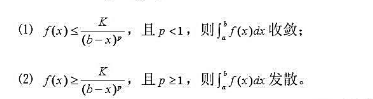
设f(x)在[a,b]只有一个奇点x=b,证明定理8.2.3'和定理8.2.5'.
定理8.2.3'(Cauchy判别法)设在[a,b)上恒有f(x)≥0,若当x属于b的某个左邻域[b-η0,b)时,存在正常数K,使得