
 如果结果不匹配,请
如果结果不匹配,请 

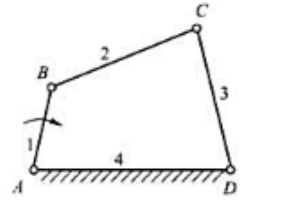
 更多“如图所示,已知四杆机构各杆长度分别为l1=250mm.l2=…”相关的问题
更多“如图所示,已知四杆机构各杆长度分别为l1=250mm.l2=…”相关的问题
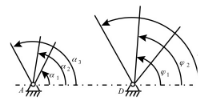
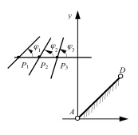
如图6-60 所示,已知某刚体上P点的三位置及其上某标线的位置角分别为: 若已知两固定支座A、D的位置坐标为:
若已知两固定支座A、D的位置坐标为: 求实现P点给定位置的四杆机构的各杆长度。
求实现P点给定位置的四杆机构的各杆长度。
A.lAB=49 mm, lBC=120 mm
B.lAB=59 mm, lBC=120 mm
C.lAB=21 mm, lBC=50 mm
D.lAB=21 mm, lBC=60 mm
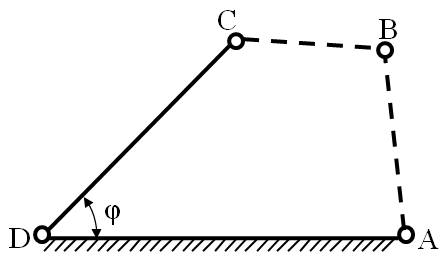
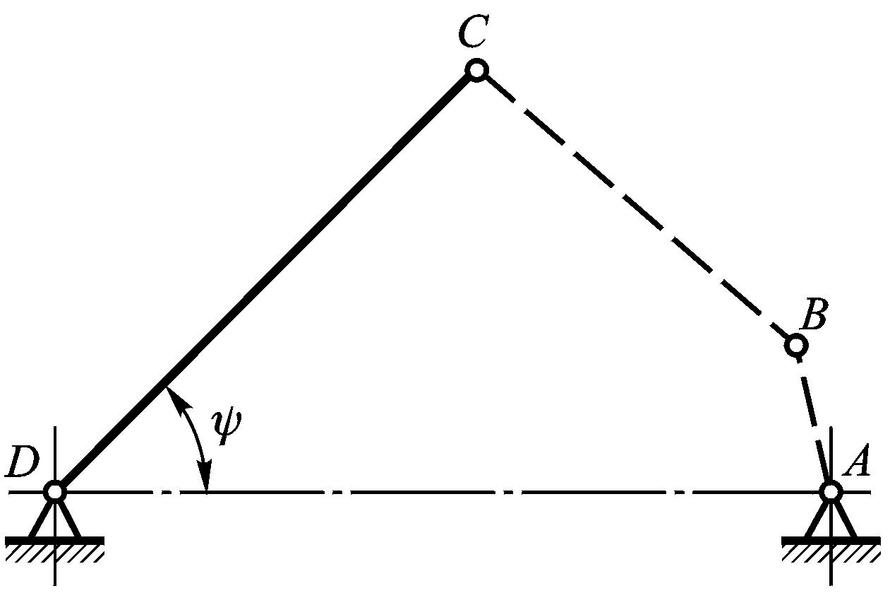
(1)当AD的长度在什么范围内,该机构成为曲柄摇杆机构?
(2)对于取d=lAD=50mm得到的曲柄摇杆机构,建立极为夹角θ与各构件长度之间的关系式,并求出θ值。
(3)建立机构最小传动角γmin与各构件长度之间的关系值,并求出γmin值。
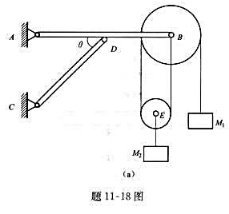
题11-18图(a)所示构架滑轮机构中,重物M1和M2的质量分别为2m和m,略去各杆及滑轮B和E的质量。已知AD=DB=l, θ=45,滑轮B和E的半径分别为r1和r2,且r1=2r2=2r.试求重物M1的加速度,a1和DC杆所受的力。
A.0.58
B.0.60
C.0.62
D.0.64
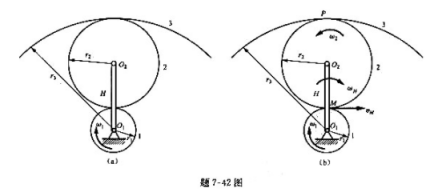
行星齿轮减速机构如题7-42图(a)所示。太阳轮1绕O1转动,带动行星轮2沿固定齿圈3滚动,行星轮2带动系杆H绕轴OH转动,从而实现了变速要求。已知各齿轮节圆半径分别为r1,r2。以及r3=r1+2r2,齿轮1和2的齿数分别为z1和z2,当齿轮1以角速度w1转动时,试求系杆角速度wH,以及传动比iH。
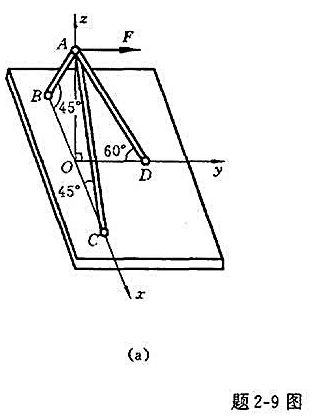
三根不计重量的杆AB,AC,AD在A点用铰链连接,各杆与水平面的夹角分别为45°,45°和60°,如题2-9图(a)所示。试求在与OD平行的力F作用下,各杆所受的力。已知F=0.6kN。






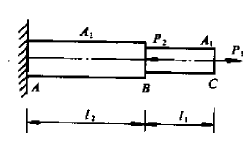
 ,
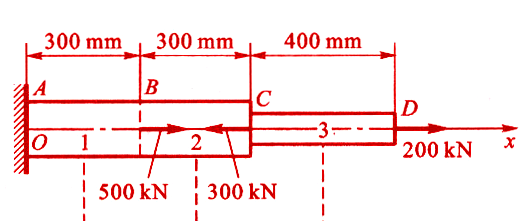
, ,弹性模量E=200GPa,杆件的总变形量是()
,弹性模量E=200GPa,杆件的总变形量是()